16. Outlier Removal Filter
Outlier Removal Filter
While calibration takes care of distortion, noise due to external factors like dust in the environment, humidity in the air, or presence of various light sources lead to sparse outliers which corrupt the results even more.
Such outliers lead to complications in the estimation of point cloud characteristics like curvature, gradients, etc. leading to erroneous values, which in turn might cause failures at various stages in our perception pipeline.
One of the filtering techniques used to remove such outliers is to perform a statistical analysis in the neighborhood of each point, and remove those points which do not meet a certain criteria. PCL’s StatisticalOutlierRemoval filter is an example of one such filtering technique. For each point in the point cloud, it computes the distance to all of its neighbors, and then calculates a mean distance.
By assuming a Gaussian distribution, all points whose mean distances are outside of an interval defined by the global distances mean+standard deviation are considered to be outliers and removed from the point cloud.
The following graphic shows the result of applying the StatisticalOutlierRemoval Filter to noisy point cloud data:
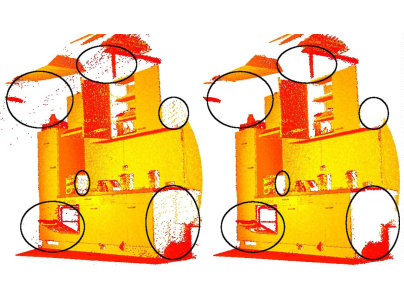
The simulated point cloud of the tabletop environment that you are working with has no outliers, so this procedure is not necessary in this exercise, but later on in the project you will be working with noisy data where outlier removal will become useful. You can implement it like this:
# Much like the previous filters, we start by creating a filter object:
outlier_filter = cloud_filtered.make_statistical_outlier_filter()
# Set the number of neighboring points to analyze for any given point
outlier_filter.set_mean_k(50)
# Set threshold scale factor
x = 1.0
# Any point with a mean distance larger than global (mean distance+x*std_dev) will be considered outlier
outlier_filter.set_std_dev_mul_thresh(x)
# Finally call the filter function for magic
cloud_filtered = outlier_filter.filter()